在gazebo中创建世界模型.world
搞机器人研究的朋友们对ROS携带的gazebo这个仿真平台一定不陌生,一些开源的仿真环境不一定完全适合自己的任务,有些环境可能需要自己根据开源环境进行一些改动。这篇文章就是分享怎么搭建自己的gazebo仿真环境。
以下实践内容基于虚拟机,Win10 + VMWare workstation 16 Pro + Ubuntu 18.04.6 + ROS Melodic
使用ROS1的经典步骤,不管使用ROS1做什么都需要做的事情——开一个终端,把master节点运行起来:
$ roscore
打开gazebo应用界面的命令:
$ sudo gazebo
其实不加sudo,只输入gazebo也是能运行起来的,但我在这一步,如果不加sudo,再gazebo里进行后续操作的时候系统会卡住,可能是电脑性能或者虚拟机的问题,因为gazebo的运行特别消耗cpu资源,在网上查了之后发现需要加上sudo
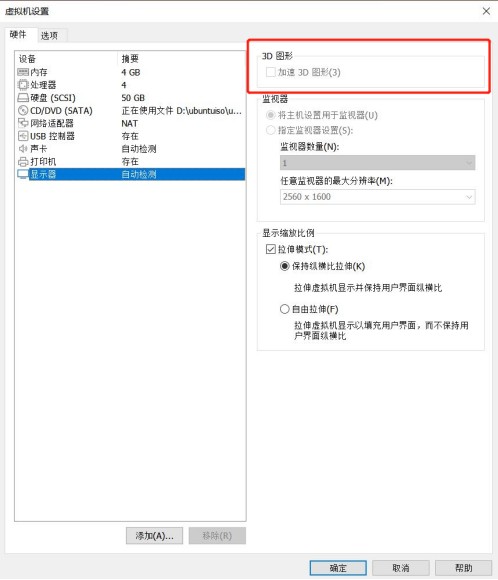
或者如果运行不起来gazebo,直接报错,可能是虚拟机的3D图形加速没关掉,先把虚拟机关掉,然后再把这个选项勾选去掉,不要选,gazebo应该就能运行起来了。
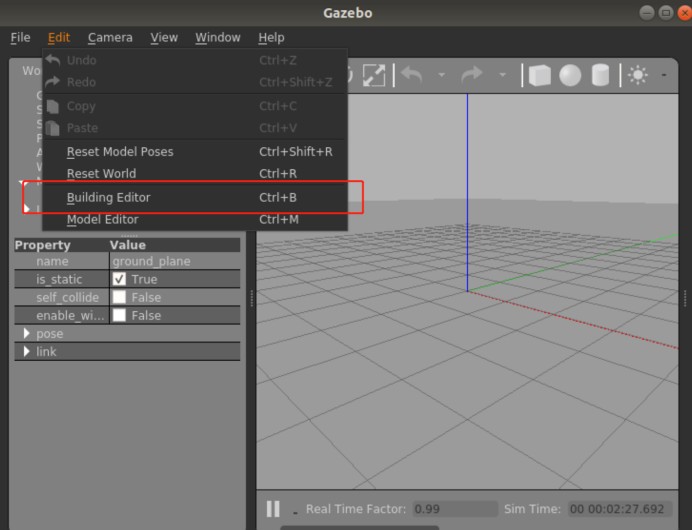
然后呢,打开模型编辑器。
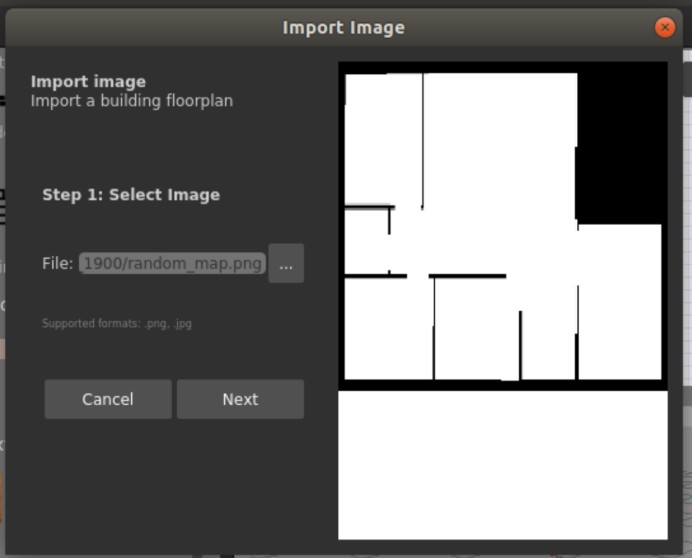
再然后呢,把要建的环境布局图导入进来。
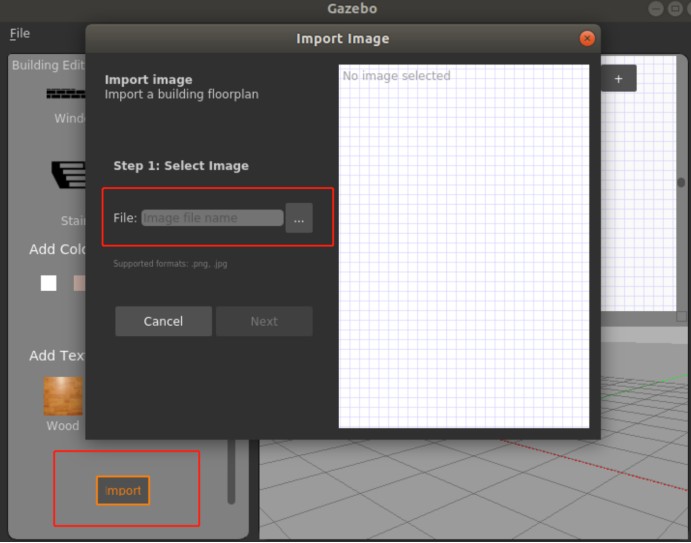
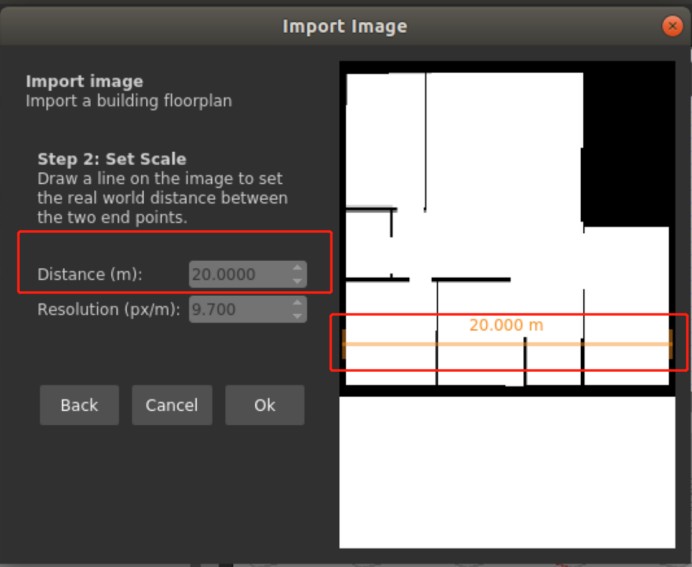
点击next,会进行一些尺寸的标定,点击一下是起点,再点击一下是终点,比如我这儿模型是20m×20m的,输入20就会自动计算比例,然后点击OK,布局就会导入到模型编辑器里。
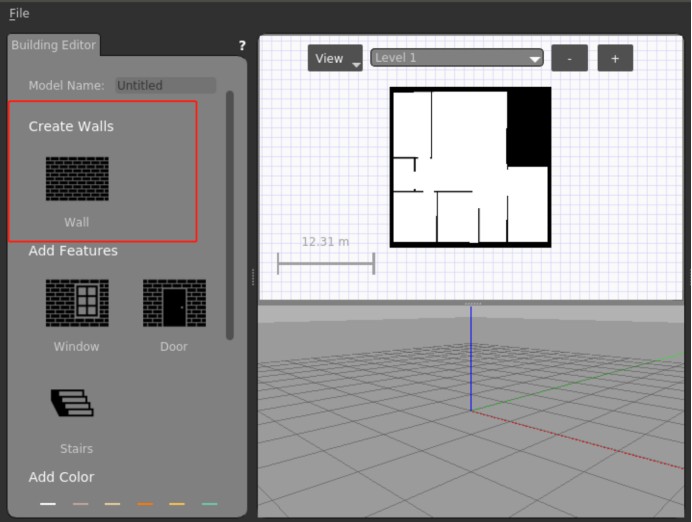
然后可以拖墙体,在布局图上照猫画虎,按着布局图的墙体位置添加墙体即可。
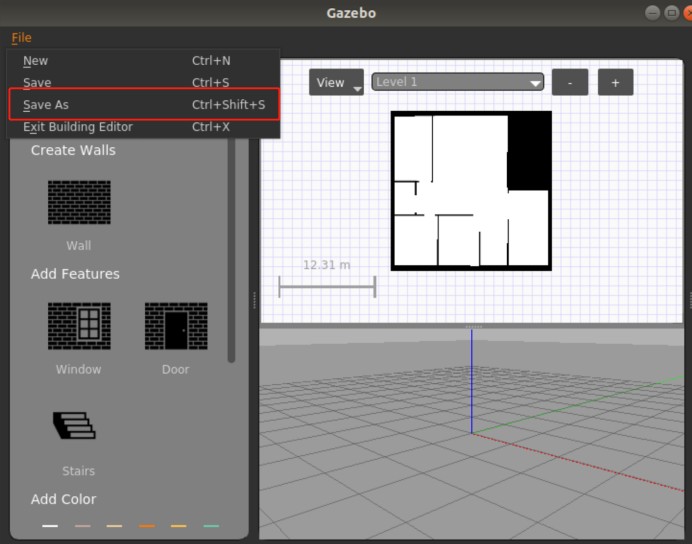
编辑好后,保存这个模型,保存到默认路径就可以,然后退出模型编辑器。
此时gazebo界面会显示出刚才建的环境模型。不要着急退出,要把这个环境保存下来,保存成world文件,才能供任务调用。这次保存位置可以根据文件夹自选。
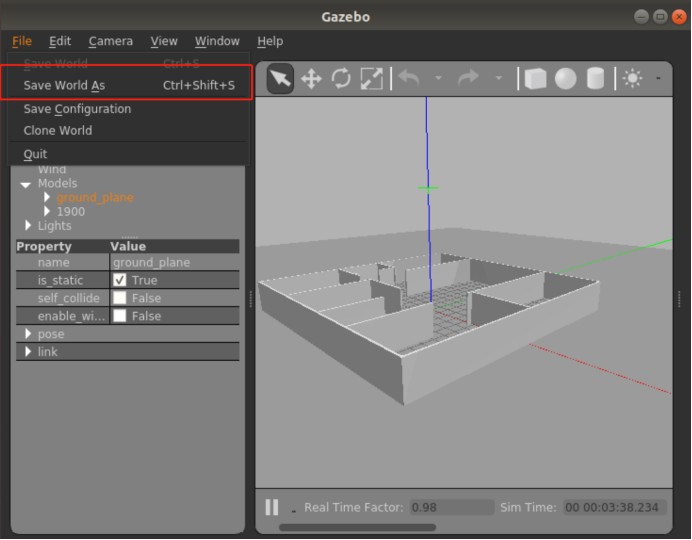
一切都保存好后,退出。
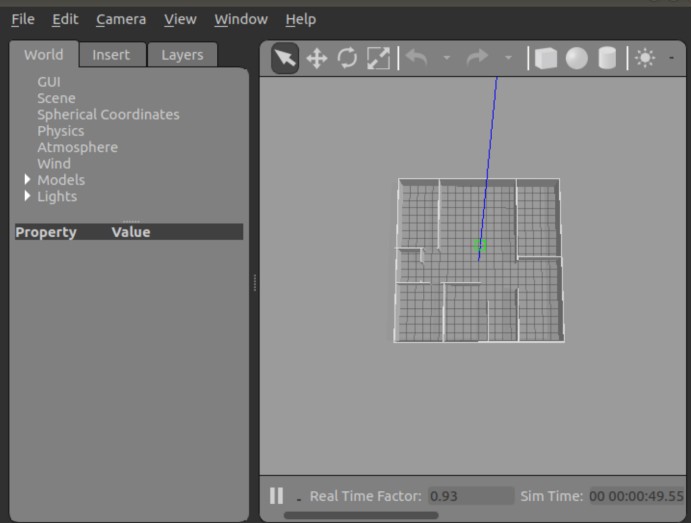
进入到保存world文件的文件夹,可以验证查看一下我们新建的world环境模型文件:
$ gazebo 1900.world
其实很简单且有意思,还可以添加窗户、门口,为墙体增加花纹颜色等,感兴趣的小伙伴可以自己动手试试哦。
- 发表于 2022-11-09 17:49
- 阅读 ( 7237 )
- 分类:ROS及基础开发
