ros1_bridge安装与试用
ros1经过多年的开发与使用,具备丰富的工具集,而ros2生态尚待完善。但是ros2天然分布式的特性又更加适应当下多机协同的工作环境,ros1_bridge就是一款能让ros2借用ros1功能的工具。本文记录ros1_bridge的安装与试用过程。
应用背景:
①ROS 1和ROS 2会在未来一段时间内共存,ROS 1 中仍有许多 ROS 2 没有的功能包
②ROS 1和ROS 2的通信协议完全不同,不能直接连接
③某些工程需要同时使用 ROS 1 和 ROS 2
ros1_bridge介绍:
①这是一款ROS 2 包,可以使 ROS 1 和 ROS 2 之间进行双向通信
②ros1_bridge是一款双宿主”程序,它同时充当 ROS 1 节点和 ROS 2 节点
ros1_bridge安装:
安装过程参考此链接:https://github.com/ros2/ros1_bridge
测试环境:
Ubuntu 20.04
ROS2 foxy + ROS noetic

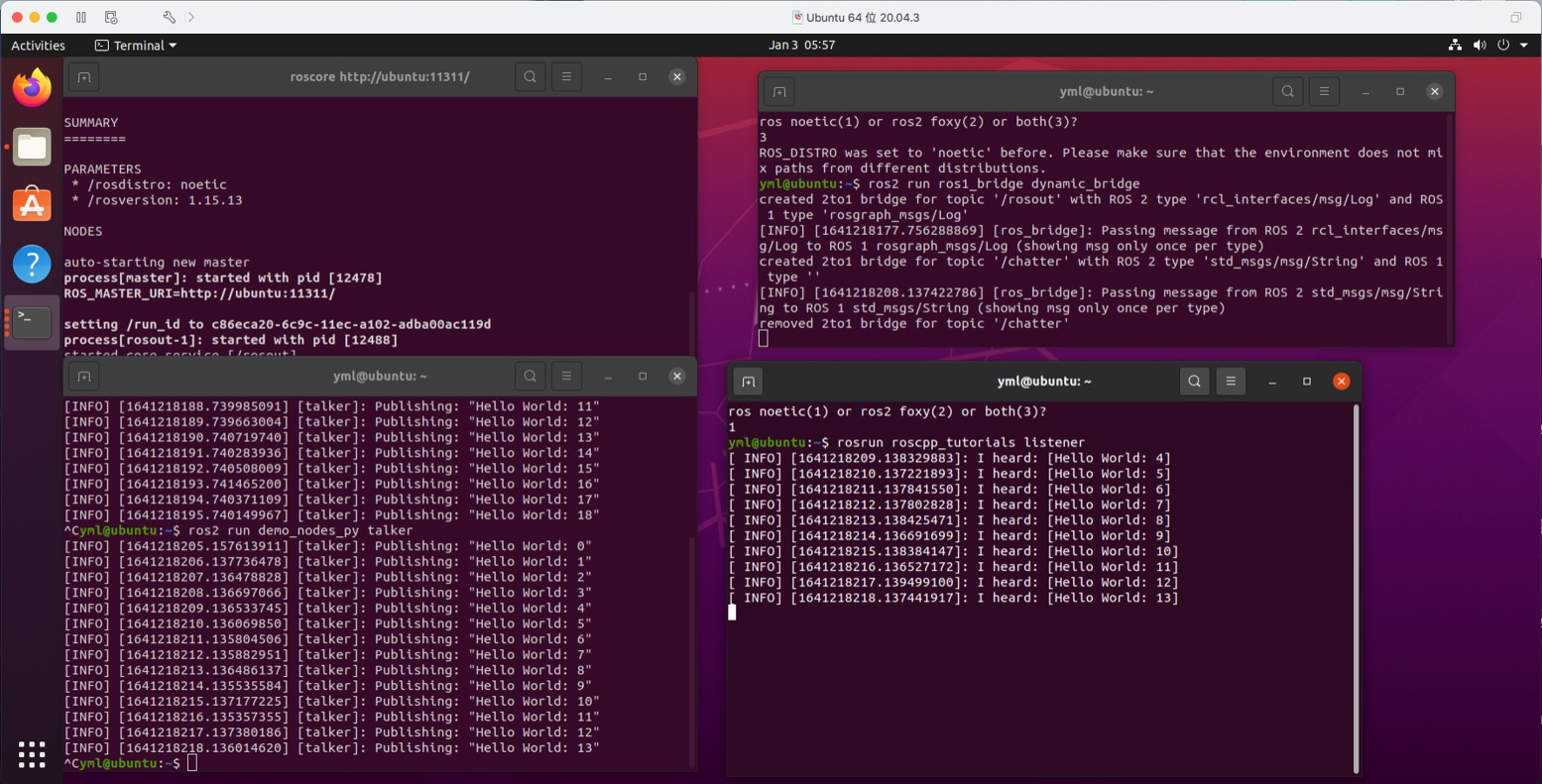
实验1:运行bridge和示例talker和listener
实验步骤:
①启动ROS 1
②启动bridge
③启动talker
④启动listener

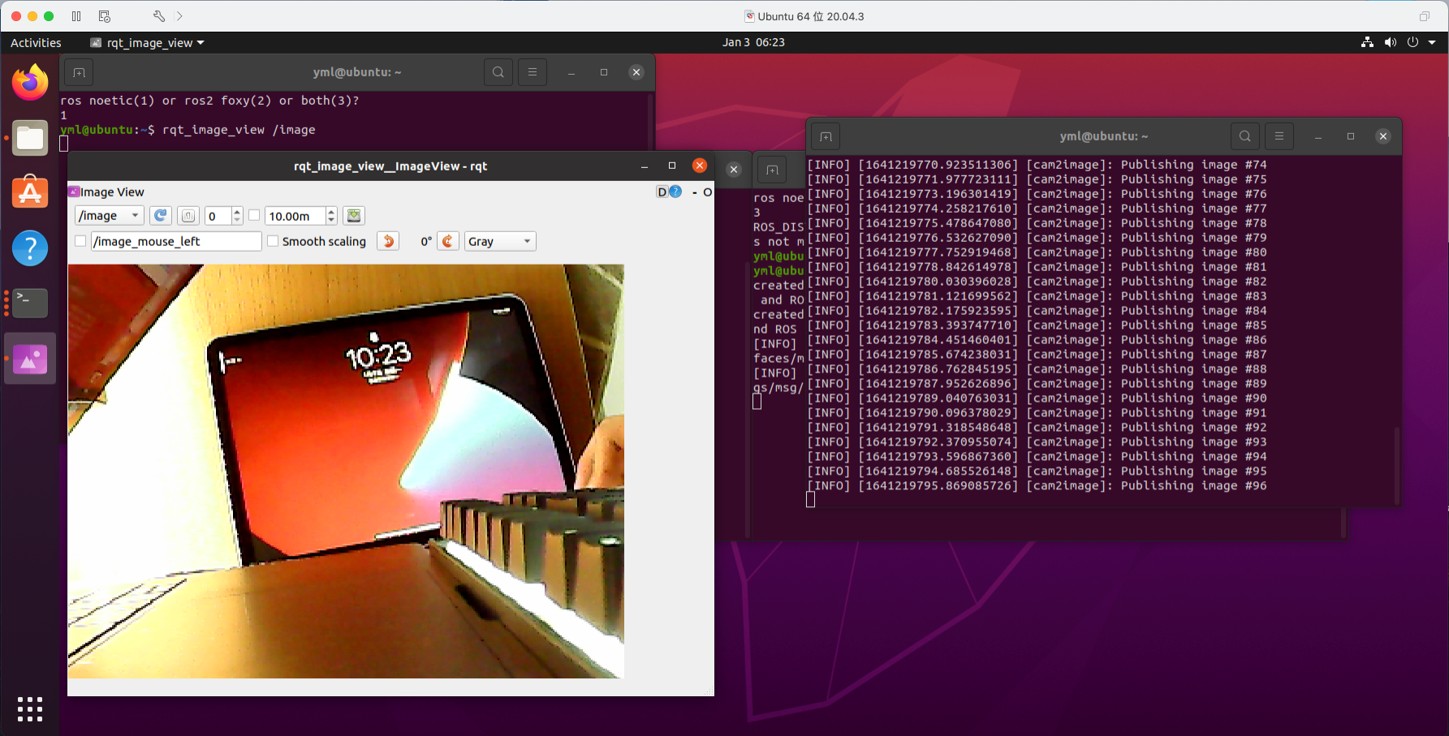
实验2:运行bridge并交换图像
实验步骤:
①启动ROS 1
②启动bridge
③启动ROS1 GUI
④启动启动ROS2图像发布器
可以看到 ROS2捕获的图像可以经过ros1_bridge传输给ROS1并由GUI显示出来
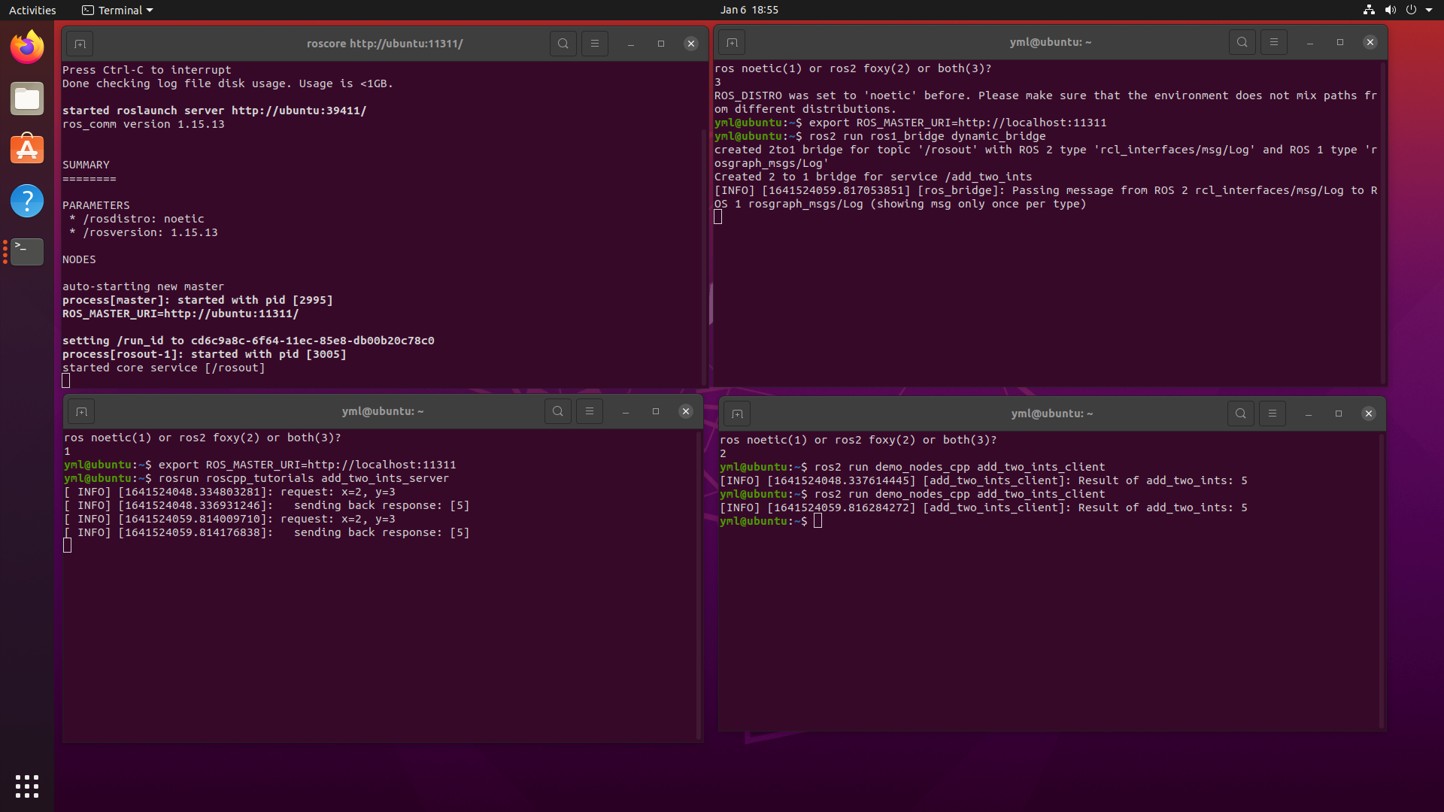
实验3:运行AddTwoInts服务
实验步骤:
①启动ROS 1
②启动bridge
③启动AddTwoInts服务
④运行TwoInts客户端
可以看到输出两整数的和
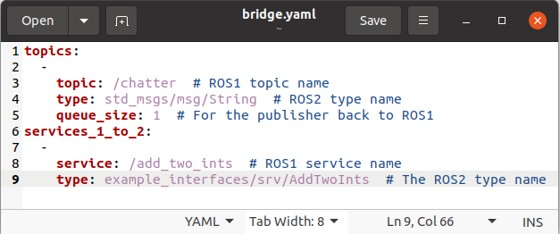
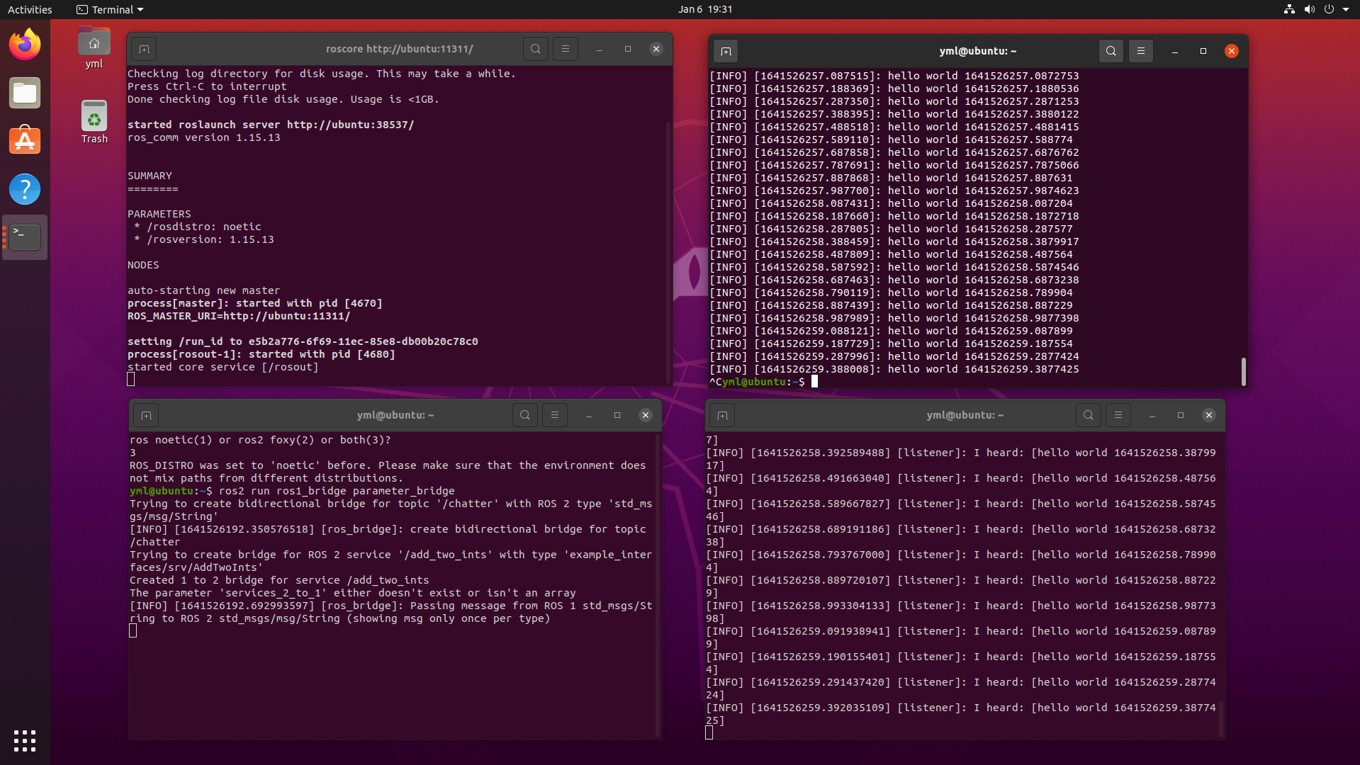
实验4:桥接选定的主题和服务
实验步骤:
①启动ROS 1、加载配置文件
②启动parameter_bridge
③桥接主题或服务
- 发表于 2022-07-24 00:37
- 阅读 ( 3032 )
- 分类:ROS及基础开发
