专著课程ppt下载 —— 第十二章 CrowdHMT 开放平台
一、章节介绍 介绍了人机物融合群智计算平台CrowdHMT平台 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱进行注册,待信息确认...
- 0
- 1
- Panda-admin
- 发布于 2022-10-17 15:53
- 阅读 ( 2763 )
专著课程ppt下载 —— 第十一章 隐私、信任与社会因素
一、章节介绍 介绍了奖励机制、隐私保护、信任计算、区块链人机物融合计算架构 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱...
- 0
- 0
- Panda-admin
- 发布于 2022-10-17 15:52
- 阅读 ( 2181 )
专著课程ppt下载 —— 第十章 群智能体分布式学习方法
一、章节介绍 介绍了基于知识蒸馏、域自适应、元学习的群智知识迁移等 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱进行注册...
- 0
- 0
- Panda-admin
- 发布于 2022-10-17 15:50
- 阅读 ( 2109 )
专著课程ppt下载 —— 第九章 人机混合学习方法
一、章节介绍 介绍传统分布式机器学习、群体联邦学习、群智能体深度强化学习 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱进...
- 0
- 0
- Panda-admin
- 发布于 2022-10-17 15:48
- 阅读 ( 2136 )
专著课程ppt下载 —— 第八章 群智能体分布式学习方法
一、章节介绍 介绍传统分布式机器学习、群体联邦学习、群智能体深度强化学习 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱进...
- 0
- 0
- Panda-admin
- 发布于 2022-10-17 15:43
- 阅读 ( 2212 )
专著课程ppt下载 —— 第七章 自学习增强与自适应演化
一、章节介绍 介绍了强化学习、深度计算方法自演化、深度计算自学习强化 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱进行注...
- 0
- 1
- Panda-admin
- 发布于 2022-10-17 15:41
- 阅读 ( 2186 )
专著课程ppt下载 —— 第六章 多源异构群智数据融合
一、章节介绍 介绍了跨模态群智数据关联、群智知识集聚发现、群智融合时刻预测 二、章节预览 三、ppt下载 提示:为了验证您的身份并确认所提供教学资源为高校教学用途,请您先用学校邮箱...
- 0
- 0
- Panda-admin
- 发布于 2022-10-17 15:37
- 阅读 ( 2105 )
专著课程ppt下载 —— 第五章 人机物协作群智感知
一、章节介绍 介绍人机物协作群智感知的发展、任务分配、数据汇聚,应用等 二、章节预览 三、ppt下载 第5章-人机物协作群智感知.pptx
- 0
- 0
- Panda-admin
- 发布于 2022-10-16 22:15
- 阅读 ( 2354 )
专著课程ppt下载 —— 第四章 人机物群智涌现动力学模型
一、章节介绍 介绍群集动力学、群智演化博弈动力学模型、人机物融合动力学建模 二、章节预览 三、ppt下载 第4章-人机物群智动力学模型.pptx
- 0
- 0
- Panda-admin
- 发布于 2022-10-16 22:13
- 阅读 ( 2084 )
专著课程ppt下载 —— 第三章 人机物群智涌现机理
一、章节介绍 介绍了人机物融合群智计算的时代背景、新兴技术、应用方向 二、章节预览 三、ppt下载 第3章-人机物群智涌现机理.pptx
- 0
- 0
- Panda-admin
- 发布于 2022-10-16 22:11
- 阅读 ( 2199 )
专著课程ppt下载 —— 第二章 人机物融合群智计算时代
一、章节介绍 介绍了人机物融合群智计算的时代背景、新兴技术、应用方向 二、章节预览 三、ppt下载 第2章-迈向人机物融合群智计算时代.pptx
- 0
- 0
- Panda-admin
- 发布于 2022-10-16 20:00
- 阅读 ( 2395 )
专著课程ppt下载 —— 第一章 绪论 人机物融合群智计算
一、章节介绍 总体介绍了全书《人机物融合群智计算》的逻辑主线、纵向关键技术脉络、横向牵引等。 二、章节预览 三、ppt下载
- 0
- 0
- Panda-admin
- 发布于 2022-10-16 19:32
- 阅读 ( 2888 )
华为云管理工具ModelArts使用方法3—使用终端SSH及密钥连接云服务器
Linux方式1. 将密钥文件权限设定为“所有者可读写”使用chmod指令完成chmod 600 key_hmt.pem ll key_hmt.pem设定完成后使用ll key_hmt.pem查看文件权限应该为"-rw-------":2. 启动ModelArts开发...
- 0
- 0
- 旺仔牛奶opo
- 发布于 2022-10-09 17:26
- 阅读 ( 1899 )
The 'use_gui' parameter was specified, which is deprecated. We'll attempt to find and run the GUI
ros仿真时,使用urdf文件配置机器人,使用roslaunch运行,出现报错
- 0
- 1
- Ruonan
- 发布于 2022-10-08 15:08
- 阅读 ( 1620 )
华为云管理工具ModelArts使用方法2—ModelArts使用PuTTY远程连接
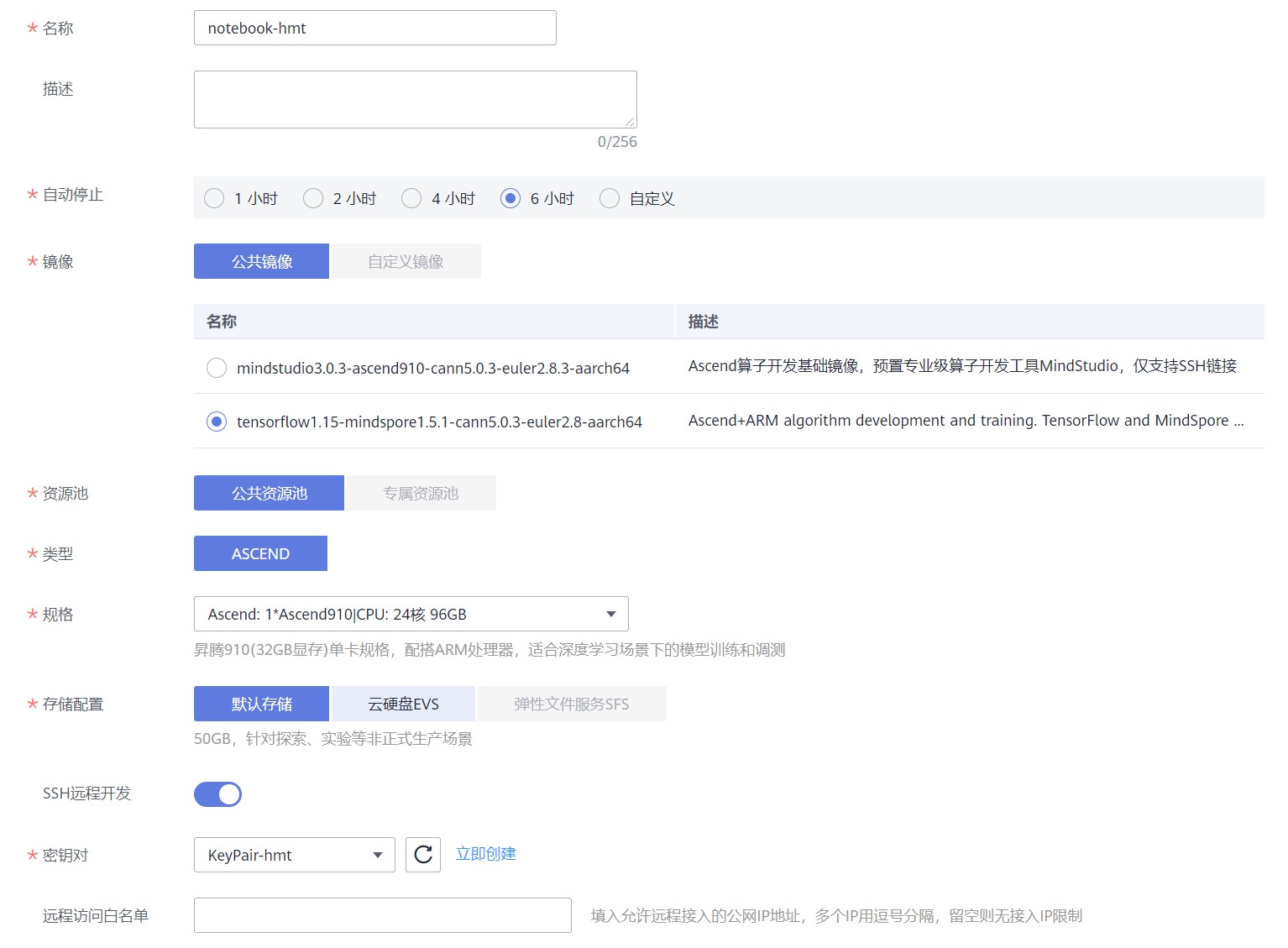
1. 创建notebook创建notebook是在华为云服务器中启动一个实例,即获取一定的计算资源、内存资源以及预先定义使用的深度学习框架 2. 创建密钥或选择密钥打开密钥创建或选择一个已经存在的密钥(...
- 0
- 1
- 旺仔牛奶opo
- 发布于 2022-10-05 23:23
- 阅读 ( 2149 )
ros下xacro转换为urdf文件时出现No such file or directory:...错误时
ros下xacro转换为urdf文件时出现No such file or directory:...错误时
- 0
- 1
- Ruonan
- 发布于 2022-09-29 11:04
- 阅读 ( 2208 )
华为云管理工具ModelArts使用方法1—云服务器的使用
云服务器的使用华为云服务器是基于鲲鹏920以及910构成的昇腾训练NPU,需要使用华为提供的ModelArts云资源管理工具进行使用。ModelArts地址:https://bssconsole.yantachaosuanzhongxin.com/#/mg...
- 0
- 1
- 旺仔牛奶opo
- 发布于 2022-09-25 20:58
- 阅读 ( 1798 )
CUDA error: no kernel image is available for execution on the device解决办法 cuda版本11.7
- 0
- 4
- 张周阳子
- 发布于 2022-09-14 19:26
- 阅读 ( 3043 )