Jetson上安装pytorchGPU版本
在Jetson上安装Pytorch的GPU版本,主要步骤包括确认JetPack版本、查找兼容的PyTorch版本、使用pip安装PyTorch,以及解决可能出现的安装问题
- 0
- 0
- LH
- 发布于 2024-01-22 23:38
- 阅读 ( 2270 )
基于目标检测所需要注意问题的调查研究
对于目标检测所需要注意的因素,通过阅读论文文献,从树莓派角度以及多个物联网终端协同部署的角度进行了阐释。
- 0
- 1
- 宋戈扬
- 发布于 2023-05-10 18:16
- 阅读 ( 2470 )
边缘设备(单设备/多设备)部署目标检测需要考虑什么
我们做的是关于在边缘设备部署目标检测模型的研究,本文包含以下几个部分,一些常见的模型压缩提高速率的算法,以及常用的多设备协同目标检测的分布式推理模型及方法,在树莓派上跑yolov5-lite的实验的踩坑记录,旨在让刚刚踏入轻量级目标检测领域大门的同学对本领域常见方法有一个大概的了解,方便后续工作的研究,还有避免一些常见的环境配置错误问题,避免不必要的浪费时间。
- 0
- 0
- 贾梓瀚
- 发布于 2023-05-09 11:16
- 阅读 ( 3903 )
场景自适应的在线多视图融合视频摘要方法研究 -- 相关工作分析(2)
场景自适应的在线多视图融合视频摘要方法研究 -- 相关工作分析
- 0
- 0
- Hao98
- 发布于 2023-02-22 16:02
- 阅读 ( 1670 )
场景自适应的在线多视图融合视频摘要方法研究 -- 相关工作分析(1)
场景自适应的在线多视图融合视频摘要方法研究 -- 相关工作分析
- 0
- 0
- Hao98
- 发布于 2023-02-22 15:49
- 阅读 ( 1606 )
如何有效应对域偏移 —— 近年研究热点总结(三)之在线域自适应
“在线域自适应”与传统域自适应和域泛化方法不同,该类方法应对的是训练阶段无法预估测试阶段数据分布的场景(这一点和域泛化方法相同),其侧重于在测试阶段利用当前的推理数据通过“边推理边训练”的模式,实现模型对未知测试数据的更新适应,从而达到精度提升的效果。
- 0
- 3
- Marco Legend
- 发布于 2023-02-12 18:08
- 阅读 ( 3643 )
如何有效应对域偏移 —— 近年研究热点总结(二)之域泛化
“域泛化”旨于应对如下问题:相比于域自适应,域泛化注重于在训练阶段,目标域数据完全不可获取的情况下,如何使得模型仅依靠源域数据获得强大的鲁棒表征能力,在无法提前观测的部署环境下保持较高的模型性能。
- 0
- 3
- Marco Legend
- 发布于 2022-12-26 16:41
- 阅读 ( 3372 )
django+nginx+gunicorn项目部署
1.使用UFW打开端口 默认情况下,Linux的防火墙是IPTables。尽管它是一个非常有效和灵活的应用程序,但事实是它不容易管理。因此,社区创造了同样有效但更容易使用的替代品,如UFW。简而言之,U...
- 0
- 0
- 刘士琦
- 发布于 2022-12-05 01:02
- 阅读 ( 1769 )
如何有效应对域偏移 —— 近年研究热点总结(一)
自深度学习发展以来,域自适应(Domain Adaptation)对上述所描述的域偏移问题进行了大量的解决方案探索。早期的域自适应方法主要集中于Unsupervised Domain Adaptation (UDA)的设置,它们旨于利用源域的标记数据去提升来自目标域的无标记数据的测试性能。近年来,越来越多的基于UDA的变体被提出,它们注重于更加苛刻和贴合现实应用的场景和问题设置,并实施更加“精妙”的解决方案来应对。
- 0
- 5
- Marco Legend
- 发布于 2022-11-09 22:35
- 阅读 ( 4377 )
深度学习编译器介绍——前端编译
深度学习编译器需要理解输入的源程序并将其映射到目标机。为了实现这两项任务,编译器的设计被分解为两个主要部分:前端和后端。
- 0
- 0
- FC
- 发布于 2022-11-09 22:15
- 阅读 ( 1645 )
华为MindSpore模型转换
使用华为mindspore模型框架下DeepLabv3+,DeepLab是一系列图像语义分割模型,DeepLabv3+通过encoder-decoder进行多尺度信息的融合,同时保留了原来的空洞卷积和ASSP层, 其骨干网络使用了Resne...
- 0
- 0
- LH
- 发布于 2022-11-09 10:37
- 阅读 ( 2333 )
华为云管理工具ModelArts使用方法3—使用终端SSH及密钥连接云服务器
Linux方式1. 将密钥文件权限设定为“所有者可读写”使用chmod指令完成chmod 600 key_hmt.pem ll key_hmt.pem设定完成后使用ll key_hmt.pem查看文件权限应该为"-rw-------":2. 启动ModelArts开发...
- 0
- 0
- 旺仔牛奶opo
- 发布于 2022-10-09 17:26
- 阅读 ( 1954 )
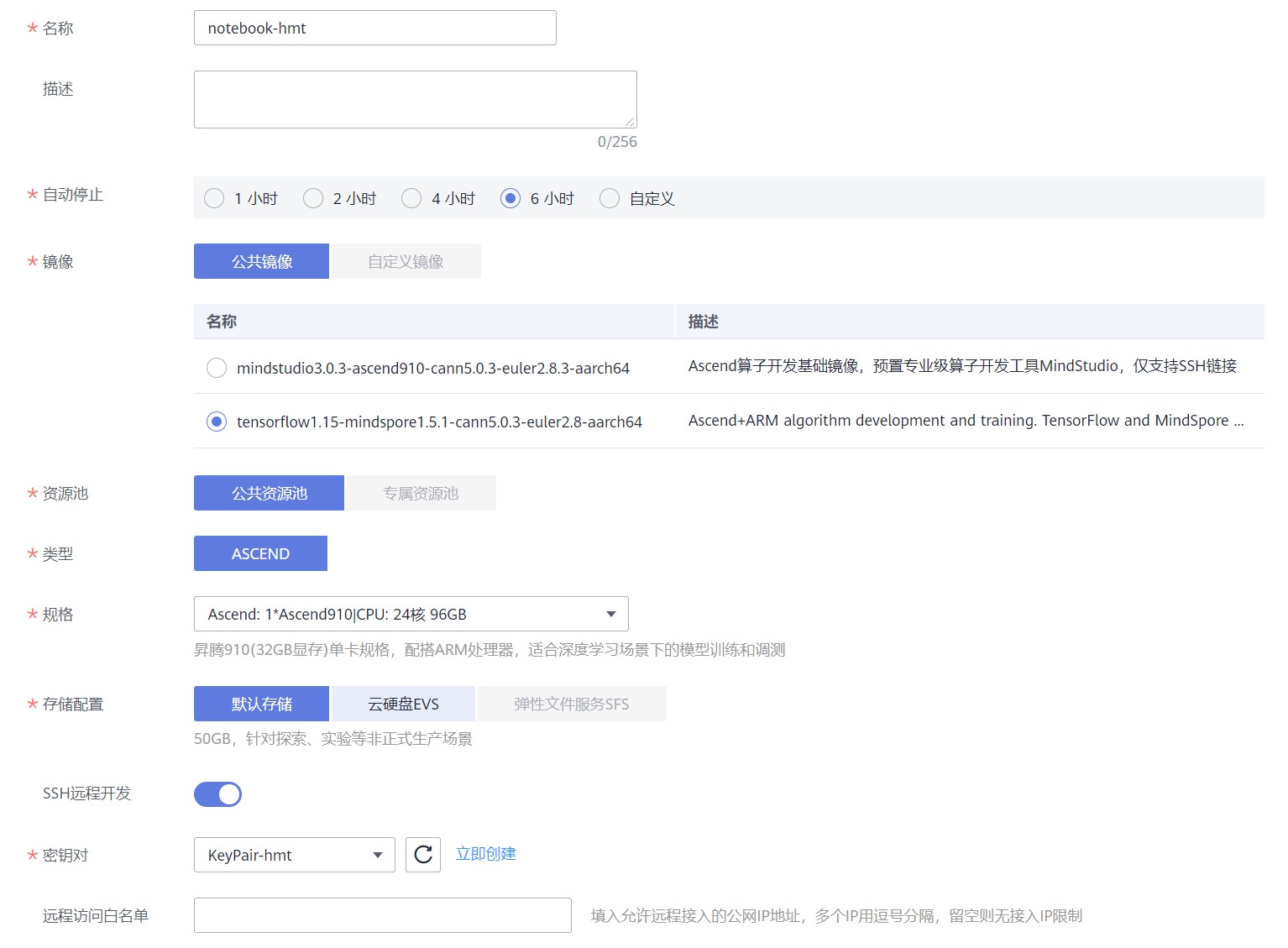
华为云管理工具ModelArts使用方法2—ModelArts使用PuTTY远程连接
1. 创建notebook创建notebook是在华为云服务器中启动一个实例,即获取一定的计算资源、内存资源以及预先定义使用的深度学习框架 2. 创建密钥或选择密钥打开密钥创建或选择一个已经存在的密钥(...
- 0
- 1
- 旺仔牛奶opo
- 发布于 2022-10-05 23:23
- 阅读 ( 2201 )
华为云管理工具ModelArts使用方法1—云服务器的使用
云服务器的使用华为云服务器是基于鲲鹏920以及910构成的昇腾训练NPU,需要使用华为提供的ModelArts云资源管理工具进行使用。ModelArts地址:https://bssconsole.yantachaosuanzhongxin.com/#/mg...
- 0
- 1
- 旺仔牛奶opo
- 发布于 2022-09-25 20:58
- 阅读 ( 1863 )
一种边端协同的目标检测任务卸载方法研究
在智能物联网背景下,摄像头已经无处不在,随着监控设备数量增长,对应每秒产生的数据量也是爆炸式增长,终端设备自身的计算资源终归有限,在面对突发的高工作负载时,无法在短时间内处理这么多的任务量。本文专注于对视频关键帧选取和任务卸载两个方面进行研究,提出了一种边端协同的目标检测任务卸载方法,从而缓解终端的工作负载,有效降低工作时延。
- 0
- 0
- LH
- 发布于 2022-07-23 12:13
- 阅读 ( 2442 )